Kiến Thức Chuyên Ngành
PID là gì? Ứng dụng và phân loại PID
PID được hiểu là một khái niệm quan trong trong điều khiển tự động, tự động hóa. Và hiện nay, chúng được sử dụng khá nhiều trong những ứng dụng công nghiệp. Bài viết hôm nay của vancongnghiephp cùng các bạn đi tìm hiểu về PID một cách chi tiết. Mời bạn đọc theo dõi bài viết dưới đây nhé!
Định nghĩa về PID là gì?
PID có tên tiếng Anh đầy đủ là Proportional Integral Derivative. Được hiểu là một cơ chế phản hồi vòng điều khiển. Được sử dụng rộng rãi trong các hệ thống điều khiển công nghiệp. Bộ điều khiển PID được ứng dụng nhiều nhất trong hệ thống điều khiển vòng kín ( hiểu là có tín hiệu phản hồi).
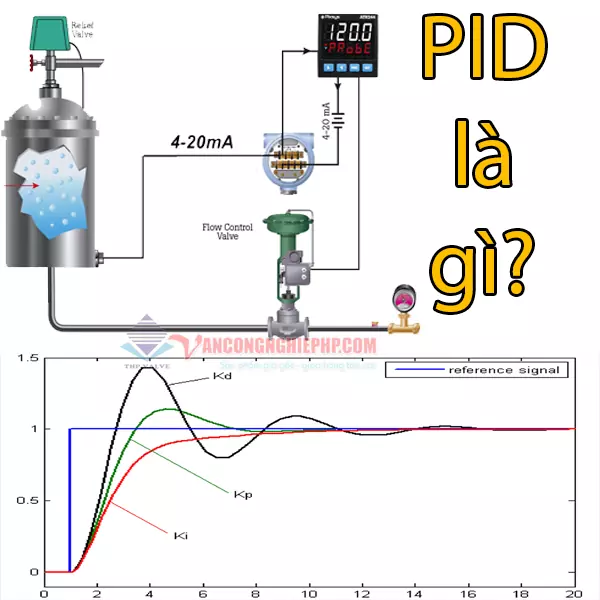
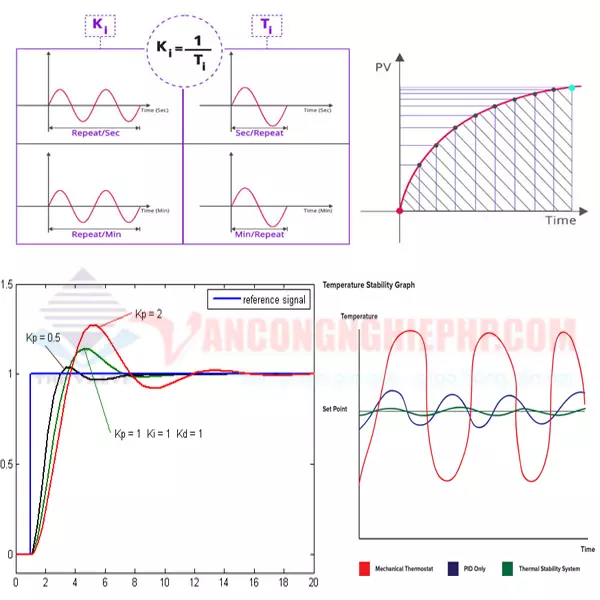
PID là sự kết hợp giữa 3 bộ điều khiển: tỉ lệ, tích phân và vi phân. Giúp cho bộ điều khiển có khả năng điều chỉnh độ sai số ở mức thấp nhất có thể. Đồng thời, nó có thể tăng tốc độ đáp ứng, giảm độ vọt lố và hạn chế được sự dao động.
Ngoài ra, bạn có thể hiểu đây là một kỹ thuật điều khiển quá trình tham gia vào các hành động xử lý về “ tỷ lệ, tích phân và vi phân”. Hiểu đơn giản hơn là: các tín hiệu sai số xảy ra sẽ được làm giảm đến mức tối thiểu nhất. Vì những ảnh hưởng của các tác động tỉ lệ, ảnh hưởng của tác động tích phân. Bên cạnh đó, được làm rõ bởi một tốc độ đạt được với tác động vi phân số liệu trước đó.
Điều khiển PID được biết đến là kiểu điều khiển có hồi tiếp vòng kín. Được sử dụng rộng rãi trong hệ thống điện, tự động hóa hoặc bảng đồng hồ điện tử…
Tìm hiểu chung về PID
Ví dụ minh họa:
Khi bạn muốn điều khiển nhiệt độ trong một hệ thống làm lạnh. Giả sử bạn muốn duy trì nhiệt độ trong hệ thống làm lạnh ở mức 5°C. Bạn có thể sử dụng một bộ điều khiển PID để điều chỉnh hoạt động của máy nén và van điều khiển lưu lượng môi chất làm lạnh.
Nếu bạn chỉ sử dụng một bộ điều khiển đơn giản mà không có tính năng điều chỉnh tỷ lệ, tích lũy và vi phân (PID), thì bạn có thể đặt nhiệt độ ngắt là 5°C. Khi nhiệt đạt đến 5°C, hệ thống sẽ tắt máy nén. Đồng thời, ngừng cung cấp môi chất làm lạnh.
Điều này có thể dẫn đến sự không ổn định và có độ chính xác thấp vì sự biến đổi và sai số trong quá trình làm lạnh. Thay vào đó, nếu sử dụng PID, nó sẽ theo dõi nhiệt độ thực tế trong hệ thống và điều chỉnh mức công suất máy nén và van điều khiển lưu lượng môi chất để duy trì nhiệt độ ổn định gần 5°C.
PID sẽ tính toán mức điều khiển đầu ra (Output) dựa trên sai lệch giữa nhiệt độ đo được và giá trị cài đặt (setpoint). Nếu sai lệch lớn, nó sẽ tăng hoặc giảm công suất máy nén và van điều khiển một cách tỷ lệ với mức độ sai lệch. Khi sai lệch tiến dần về 0, bộ điều khiển PID sẽ giảm dần mức điều khiển đầu ra để tránh quá điều chỉnh và tạo sự ổn định.
Với việc sử dụng bộ điều khiển PID, hệ thống làm lạnh có thể duy trì nhiệt độ ổn định gần 5°C, giảm thiểu sai số và tăng tính chính xác trong quá trình điều khiển.
Ý nghĩa của PID
Một cách hiểu đơn giản về PID như sau:
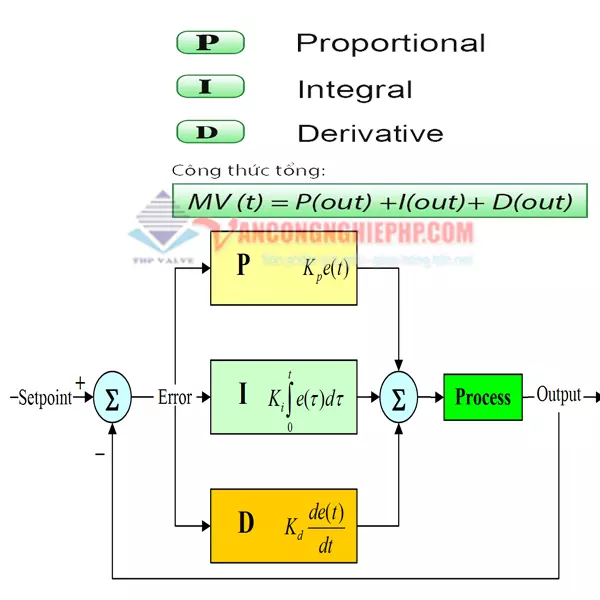
- P: Là phương pháp điều chỉnh tỉ lệ. Giúp tạo ra tín hiệu điều chỉnh tỉ lệ với sai lệch đầu vào theo thời gian lấy mẫu.
- I: Là phân tích của sự sai lệch theo thời gian lấy mẫu. Với điều khiển tích phân chính là phương pháp điều chỉnh để có thể tạo ra các tín hiệu điều chỉnh sao cho sự sai lệch giảm về 0. Từ đó, người dùng có thể biết được tổng sai số tức thời theo thời gian. Hoặc là sai số tích lũy trong quá khứ. Với thời gian càng nhỏ nó thể hiện tác động điều chỉnh tích phân càng mạnh. Nó tương ứng với độ lệch càng nhỏ.
- D: Là vi phân của sai lệch. Dạng điều khiển vi phân là tạo ra tín hiệu điều chỉnh sao cho tỉ lệ với tốc độ thay đổi sai lệch đầu vào. Khi thời gian càng lớn thì phạm vi điều chỉnh vi phân sẽ càng mạnh. Và nó tương ứng với bộ điều chỉnh đáp ứng với thay đổi đầu vào càng nhanh.
Mục đích sử dụng bộ điều khiển PID là gì?
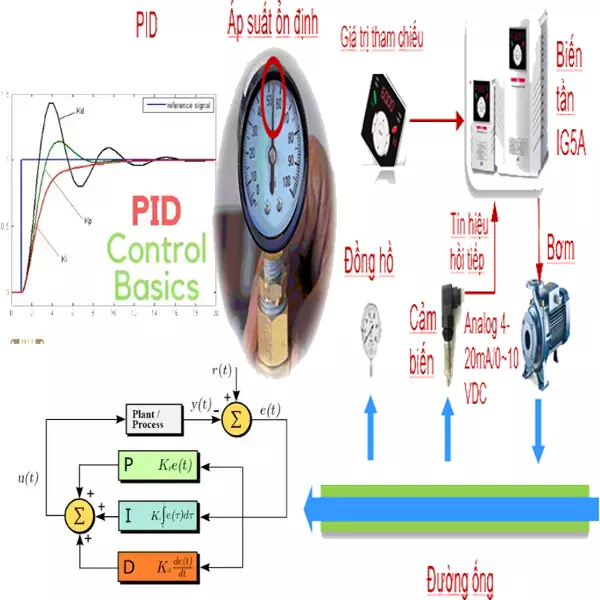
PID được biết đến là bộ điều khiển lý tưởng trong các hệ thống điều khiển tự động hiện đại. Hầu hết, bộ điều khiển này được ứng dụng trong quá trình tự động trong công nghiệp hiện nay. Nó giúp điều chỉnh lưu lượng, nhiệt độ và áp suất…
- Giúp giảm sai số xác lập ở mức tối thiểu nhất.
- Giúp hạn chế độ dao động
- Giúp giảm thời gian xác lập và độ vọt lố.
Ứng dụng thực tế của bộ điều khiển PID
Điều khiển mức nước bằng PID
Quá trình điều khiển mức nước bằng tay có độ chính xác không cao. Để có thể duy trì được mức nước cố định có trong tank khi vừa xả nước vào và vừa mở van bên dưới tank ra. Thì người vận hành phải dựa vào mặt quan sát và điều chỉnh đóng – mở van sao cho nước luôn ở mức cho phép.

Tuy nhiên, bộ điều khiển PID có thể chạy hoàn toàn tự động. Người vận hành không cần sự can thiệp. Và cần có những điều sau:
- Bộ điều khiển có khả năng nhận tín hiệu hiệu 4 – 20mA, ngõ ra PID 4 – 20mA
- Sử dụng cảm biến đo mức nước 4 – 20mA
- Sử dụng van điều khiển nước xả ra tín hiệu 4 – 20mA
- Mức nước đo từ cảm biến sẽ được gọi là biến quá trình (PV)
- SV: là giá trị cài đặt cần mong muốn. Khi SC khác với PV thì PID sẽ điều chỉnh và duy trì nước trong bể một cách chính xác.
PID trong biến tần
Ví dụ:
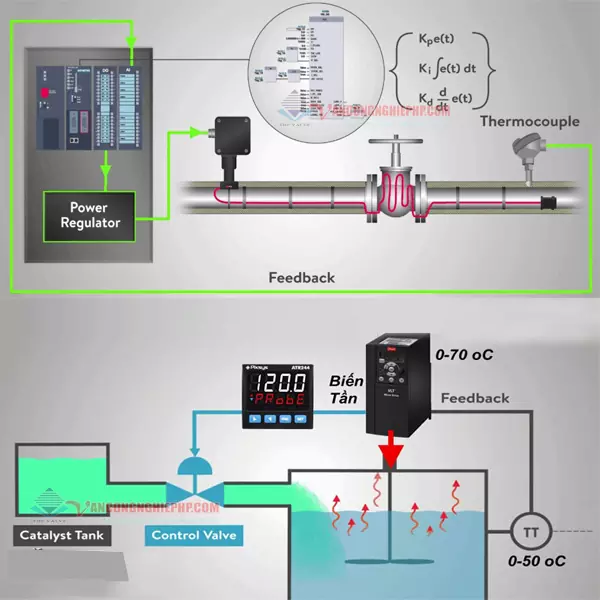
Có một bể chứa dung dịch vừa cần trộn đều dung dịch lại vừa có thể điều khiển nhiệt độ ở mức 70 độ C.
Để có thể điều khiển tự động với PID, ta cần kết hợp của các thiết bị sau:
- Van điều khiển lưu lượng
- Thiết bị cảm biến nhiệt độ
- Biến tần điều khiển PID cho động cơ
- Bộ điều khiển nhiệt độ PID cho van điều khiển
Với thiết bị cảm biến nhiệt độ nó có thể điều khiển được tốc độ của biến tần và lưu lượng đi qua van. Nó đảm bảo được mức độ trộn đều dung dịch và nhiệt độ trong bề. Việc tăng hoặc giảm nhiệt phụ thuộc hoàn toàn vào lưu lượng dịch đi qua van. Còn trộn dung dịch đều hay không lại phụ thuộc vào biến tần.
Điều khiển tín hiệu PID là một quá trình phức tạp. Nó có thể điều chỉnh chính xác các đối tượng: nhiệt độ, độ ẩm, chiều dài,… Vì vậy, cần phải thiết kế từng PID độc lập cho từng đối tượng.
Bộ điều khiển PID trong PLC
Đối với những hệ thống lớn và sử dụng PLC/DCS để điều khiển PID thì không cần sử dụng bộ điều khiển PID riêng lẻ. Vì trong PLC có sẵn các hàm PID để điều khiển nhiệt độ, áp suất và lưu lượng. Nó sẽ đem đến một kết quả chính xác.
Việc khó khăn của PLC chính là tự chọn các thông số để chạy thử nghiệm. Để có thể chọn ra được một hệ số PID chính xác nhất. Trong bộ điều khiển PID 4 – 20mA đều có chức năng Auto turning nên có thể tự dò các hệ số này. Độ chính xác của nó lên tới 98%.
Vì vậy, ta chỉ cần hiểu các thông số PI – PD – PID nên việc tăng hoặc giảm các giá trị tham số. Từ đó, giúp người sử dụng lấy được kết quả như mong muốn và đơn giản hơn.
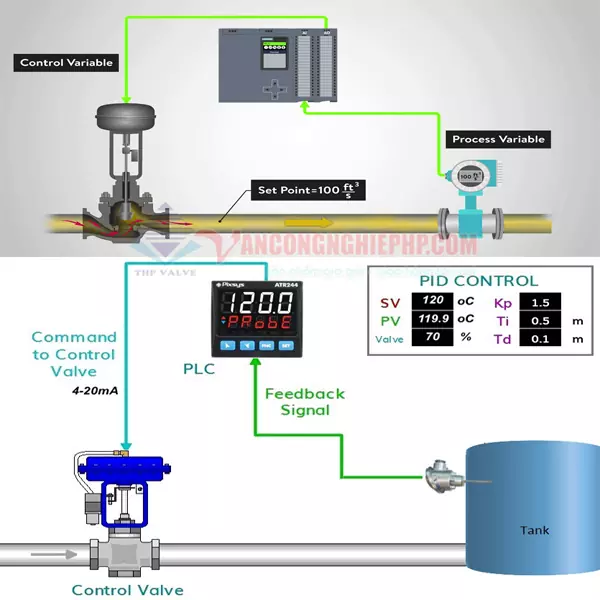
Ví dụ minh hoạt:
Ví dụ tương tự có thể là việc điều khiển mức nước trong một hồ chứa. Hồ này sử dụng một van điều khiển và đồng hồ đo mức nước. Thay vì điều khiển mức nước bằng cách kiểm soát áp suất hoặc công suất bơm. Thì ta có thể sử dụng đồng hồ đo mức nước để truyền tín hiệu điều khiển cho van.
Khi muốn duy trì mức nước trong hồ chứa ở mức ấn định, chúng ta chỉ cần điều khiển van thông qua PLC (Programmable Logic Controller) dựa trên tín hiệu đo mức từ đồng hồ. Ví dụ, nếu chúng ta muốn mức nước ở mức 2 mét, khi mức nước thấp hơn 2 mét. PLC sẽ mở van để cho nước vào hồ chứa. Ngược lại, khi mức nước cao hơn 2 mét, PLC sẽ đóng van để ngăn nước tiếp tục chảy vào.
Qua việc sử dụng đồng hồ đo mức nước và truyền tín hiệu điều khiển cho van. Chúng ta có thể điều chỉnh mức nước trong hồ chứa một cách tự động và chính xác. Điều này giúp giảm sự phụ thuộc vào áp suất hoặc công suất bơm. Đồng thời, tăng tính ổn định và hiệu suất của hệ thống.
Phân loại điều khiển
Trong bộ điều khiển này được phân thành các loại điển hình sau:
- PI: Hay còn được gọi là Proportional and Integral Controller. Là bộ điều khiển tỉ lệ, tích phân.
- P: Có tên đầy đủ là Proportional Controller. Là bộ điều khiển tỉ lệ.
- PID: Tên đầy đủ là Proportional, Integral and Derivative (PID) Controller. Được hiểu là bộ điều khiển tỉ lệ – tích phân – vi phân ( đạo hàm).
- PD: Còn được gọi là Proportional and Derivative (PD) Controller. Được gọi là bộ điều khiển vi phân ( hay còn được gọi là đạo hàm).
Cách thức hoạt động của bộ điều khiển PID
Trong một hệ thống điều khiển thì nó sẽ được lắp nhiều thiết bị khác nhau như:
- Cơ cấu chấp hành ( hay còn được gọi là thiết bị gia nhiệt).
- Thiết bị điều khiển được cài đặt như HMI màn hình hay là PLC.
- Các thiết bị hồi tiếp như: cảm biến áp suất, nhiệt độ…
Khi bạn chọn được một giá trị setpoint hay ta còn gọi là SV giá trị cài đặt. Thì bộ điều khiển sẽ gửi những thông tin sẽ được gửi đi. Nó cho biết những thông tin điều khiển đến từng thiết bị chấp hành, cơ cấu.
Tại quá trình này thì hàng loạt thuật toán sẽ được yêu cầu đóng – mở liên tục. Nó tương ứng với thời gian chậm hoặc nhanh. Và phụ thuộc hoàn toàn vào hệ thống đang làm việc.
Ví dụ minh hoạt:
Ví dụ việc điều khiển nhiệt độ trong một hệ thống làm nóng. Trong biểu đồ, nhiệt độ được điều khiển luôn ở mức 200 độ F. Và sử dụng chế độ on-off để duy trì nhiệt độ này. Khi nhiệt độ tăng lên 202 độ F, hệ thống sẽ ngắt nguồn nhiệt. Khi nhiệt độ giảm xuống 198 độ F, hệ thống sẽ bật nguồn nhiệt lại.
Phương pháp on-off giúp đảm bảo rằng nhiệt độ luôn tiếp cận mục tiêu là 200 độ F. Khi nhiệt độ cao hơn, hệ thống sẽ ngắt nhiệt để ngăn nhiệt độ tiếp tục tăng lên. Ngược lại, khi nhiệt độ thấp hơn, hệ thống sẽ bật nhiệt để tăng nhiệt độ lên mức cài đặt.
Tuy phương pháp này đơn giản và liên tục đóng mở nguồn nhiệt. Nhưng nó đảm bảo nhiệt độ ổn định gần mức cài đặt. Mức on-off tại 202 độ F và 198 độ F được chọn để đảm bảo rằng nhiệt độ không vượt quá ngưỡng cài đặt và dao động quá mức cho phép. Sẽ giữ cho nhiệt độ gần giá trị mục tiêu.
Tại sao cần sử dụng PID
Để có thể hiểu về điều khiển PID một cách dễ dàng. Chúng ta cùng xét dựa trên một bài toán: Kiểm soát nhiệt độ nước xả ra từ lò sưởi đốt gas công nghiệp.
Kiểm soát nhiệt độ theo phương pháp thủ công
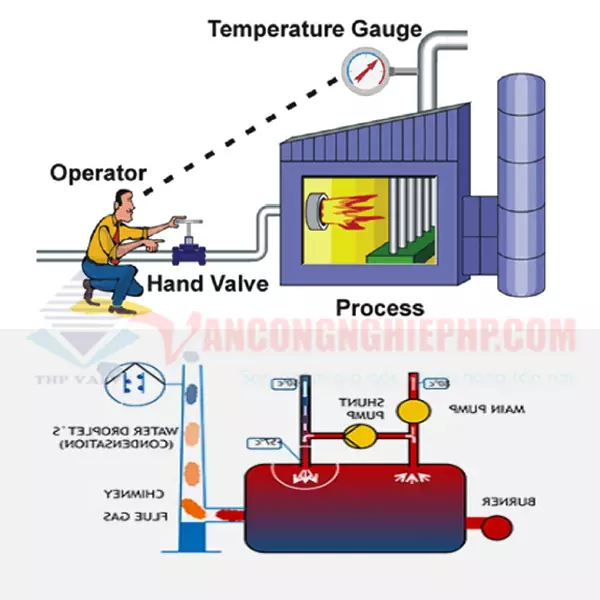
Để có thể kiểm soát được nhiệt độ cho nước cả từ sưởi đốt gas công nghiệp. Người dùng cần phải xem đồng hồ đo nhiệt độ và điều chỉnh van gas nhiên liệu cho phù hợp. Nếu như nhiệt độ của nước vượt quá yêu cầu, người dùng cần giảm góc mở của van gas ( đóng van vừa đủ). Điều này sẽ giảm nguyên liệu đốt và giảm được nhiệt độ nước cả theo giá trị mong muốn.
Nếu nhiệt độ nước giảm xuống mức yêu cầu, thì người dùng cần tăng góc mở van gas ( mở van vừa đủ). Nhằm tăng khả năng đưa thêm nguyên liệu đốt vào lò. Đồng thời, tăng nhiệt độ nước xả ra theo giá trị mong muốn.
Nhiệm vụ điều khiển được thực hiện bởi người vận hành nên được gọi là điều khiển phản hồi. Bởi vì, người vận hành có thể thay đổi được tốc độ đốt. Dựa trên phản hồi từ quá trình thông qua đồng hồ đo nhiệt độ. Người vận hành, van, lò sưởi và đồng hồ đo nhiệt sẽ tạo ra một vòng điều khiển.
Kiểm soát nhiệt độ theo phương pháp tự động ( điều khiển PID)
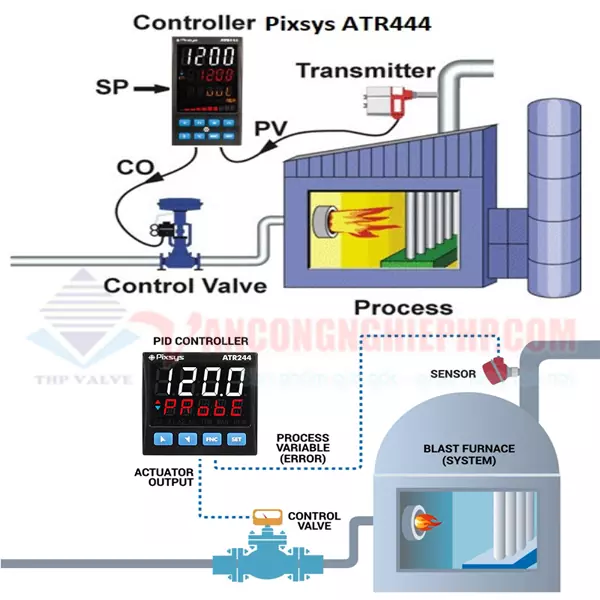
Thay vì kiểm soát nhiệt độ như trên thì chúng ta có thể kiểm soát được nhiệt độ của nước xả ra từ lò sưởi đốt gas công nghiệp bằng phương pháp tự động. Và để hoạt động tự động ta cần thực hiện những bước sau:
- Sử dụng các thiết bị đo nhiệt độ điện tử
- Lắp đặt và sử dụng van điều khiển điện tử ( ta có thể sử dụng bộ truyền động, bộ xác định vị trí… )
- Sử dụng bộ điều khiển (PID) và thiết lập. Cũng như kết nối nó với thiết bị đo nhiệt độ và van điều khiển điện tử.
Với bộ điều khiển này, người dùng có thể thiết lập tham số điểm đặt cho bộ điều khiển PID ở nhiệt độ mong muốn. Và đầu ra của bộ điều khiển là đặt vị trí của van điều khiển ( đặt giá trị mở van). Lúc này nhiệt độ đo được từ cảm biến nhiệt độ được gọi là biến quá trình. Sau đó, nó được truyền đến bộ điều khiển PID. Bộ điều khiển so sánh giá trị nhiệt độ nhận được từ cảm biến với giá trị nhiệt độ điểm đặt ban đầu. Đồng thời, nó tính toán sự chênh lệch hoặc sai số giữa 2 tín hiệu. Từ đó, dựa trên sai số và các hằng số điều chỉnh của bộ điều khiển, bộ điều khiển tính toán đầu ra sẽ điều khiển góc – mở van với độ chính xác nhất. Nhằm giữ được nhiệt độ luôn ở giá trị điểm đặt. Tuy nhiên, nếu nhiệt độ tăng trên điểm đặt của nó, bộ điều khiển sẽ giảm góc mở van và ngược lại.
Hướng dẫn điều chỉnh thông số đối với bộ điều khiển PID
Để có thể điều chỉnh được bộ điều khiển này một cách chính xác, nó không chỉ là nắm được 3 thông số cơ bản. Mà còn cần người vận hành phải hiểu rõ hơn. Vì vậy, bạn có thể tham khảo hướng dẫn cách điều chỉnh như sau:
Tối ưu hóa hành vi
Bước điều chỉnh này sẽ giúp thay đổi quá trình hoặc các điểm đặt của bộ điều khiển PID. Với cách làm này, bạn chỉ cần tự điều chỉnh lệch và ổn định. Nhưng nó lại phụ thuộc vào nhiều tiêu chuẩn khác nhau như: Thời gian xác lập, thời gian khởi động máy. Tuy nhiên, cần phải lưu ý là tối ưu hóa năng lượng đã tiêu hao, giúp cho các hoạt động được hiệu quả.
Độ ổn định
Khi có độ trễ lớn thì nó sẽ tạo ra sự bất ổn định. Và để có thể đạt được sự ổn định cao, cần phải đảm bảo không xảy ra sự dao động trong cả quá trình.
Các khâu hiệu chỉnh có trong PID
Khâu tỉ lệ
Khâu tỉ lệ chính là độ lợi. Đây là khâu giúp thay đổi giá trị ở đầu ra và được tỉ lệ với giá trị sai số.
Và để đáp ứng được yêu cầu về tỷ lệ, người dùng nên điều chỉnh độ lợi qua các tính toán: nhân sai số với 1 hằng số tỉ lệ (Kp). Khâu tỉ lệ khi đó được tính như sau:
Trong đó:
- P (out): Thừa số tỉ lệ đầu ra
- e: là sai số, được tính bằng SP – PV
- Kp: Hệ số tỉ lệ ( còn được gọi là thống số điều chỉnh
- t: thời gian/ khoảng thời gian tức thời
Khâu phân tích
Khâu này tỉ lệ thuận với biên độ sai số, quãng thời gian xảy ra sai số. Nhờ tổng sai số tức thời mà chúng ta có thể thấy được tích lũy bù mà được đó đã được hiệu chỉnh.
Trong đó:
- e: biểu thị các sai số
- I (out): Thừa số phân tích đầu ra
- t: thời gian/ thời gian tức thời
- Ki: Độ lợi phân tích ( hay là thông số điều chỉnh).
Khâu vi phân
Để tính được tốc độ của sai số trong 1 quá trình, ta cần xác định được độ dốc của sai số theo thời gian. Ta cần áp dụng theo công thức:
Trong đó:
- D(out): Thừa số vi phân của đầu ra
- e: sai số
- Kd: Độ lợi vi phân, là một thông số điều chỉnh
- t: là thời gian/ thời gian tức thời
Các dạng của PID, ký hiệu thay thế
Hiện nay, Proportional Integral Derivative ở trên thị trường có 4 dạng chính. Gồm những dạng sau:
- Dạng 1: Điều chỉnh lý tưởng, tiêu chuẩn: Được hiểu là dạng phù hợp để điều chỉnh nhiều thuận toán của PID. Độ lợi Kp dùng ở khâu D out hay I out.
- Dạng 2: Tương hỗ hay còn được gọi là tiếp nối: Bao gồm toàn bộ hệ thống PD, PI nối tiếp nhau. Nhờ đó, người dùng dễ dàng sử dụng bộ điều khiển kỹ thuật số hơn. Sau này, người ta phát triển các sản phẩm kế thừa nó và dùng ở dạng hỗ trợ nhau.
- Dạng 3: LaPlace của hệ thống điều chỉnh PI. Ở đây sẽ sử dụng bộ PID cùng với hàm truyền của hệ thống điều khiển. Nhờ đó, người dùng xác định được hàm truyền trong vòng kín của PID nhanh hơn.
- Dạng 4: Rời rạc hóa trong PID. Là dạng PID Control kỹ thuật số, gắn trên 1 vi điều khiển MC hay RPGA. Dạng này sẽ yêu cầu dùng dạng chuẩn nhưng phải rời rạc. Và nó dựa vào biểu đồ thời gian mẫu mà việc phân tích sẽ trở nên rời rạc.
Trong bài viết trên, vancongnghiep đã chia sẻ chia tiết về PID là gì? Mục đích sử dụng như thế nào? Ứng dụng thực tế ra sao?… Mong rằng, với những thông tin chia sẻ trên hữu ích với các bạn.
>>> Xem thêm: Giao thức truyền thông modbus là gì? Modbus RUT, TCP, ASCll, Plus